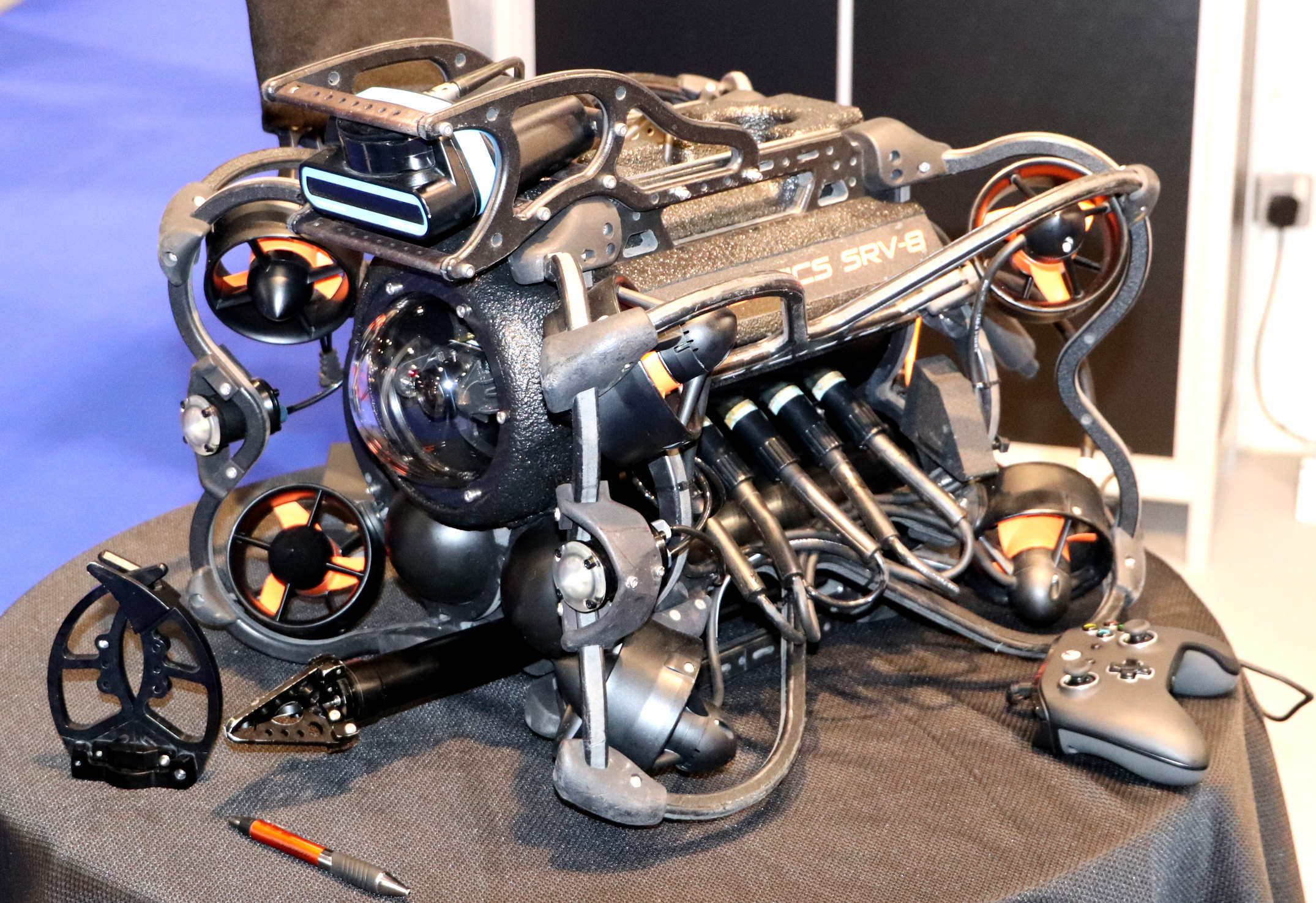
OCEAN
BOTICS - This compact unit is light enough to manhandle onboard
and small enough to stow away without too much additional
designing of vessels like the Elizabeth
Swann. John
Storm would like this unit.
Unlike
submersibles,
ROVs are unmanned, usually highly maneuverable, and operated by a crew either aboard a vessel/floating platform
above the area of operation, or on proximate land.
Smaller
ROVs are perfect survey tools for amateur or professional
treasure hunters, like Safiya
Sabuka in the fictional search for Cleopatra's
mummy.
ROVs
or UUVs (Unmanned
Underwater Vessels) are common in deepwater industries such as offshore hydrocarbon
extraction oil rigs. They are linked to a host ship by a neutrally buoyant tether or, often when working in rough conditions or in deeper water, a load-carrying umbilical cable is used along with a
Tether Management System (TMS). The TMS is either a garage-like device which contains the ROV during lowering through the splash zone or, on larger work-class ROVs, a separate assembly which sits on top of the ROV. The purpose of the TMS is to lengthen and shorten the tether so the effect of cable drag where there are underwater currents is minimized.
The umbilical cable is an armored cable that contains a group of electrical conductors and fiber optics that carry electric power, video, and data signals between the operator and the TMS. Where used, the TMS then relays the signals and power for the ROV down the tether cable. Once at the ROV, the electric power is distributed between the components of the ROV. However, in high-power applications, most of the electric power drives a high-power electric motor which drives a hydraulic pump. The pump is then used for propulsion and to power equipment such as torque tools and manipulator arms where electric motors would be too difficult to implement subsea. Most ROVs are equipped with at least a video camera and lights.
Additional equipment is commonly added to expand the vehicle's capabilities. These may include sonars, magnetometers, a still camera, a manipulator or cutting arm, water samplers, and instruments that measure water clarity,
water temperature, water density, sound velocity,
and light penetration.

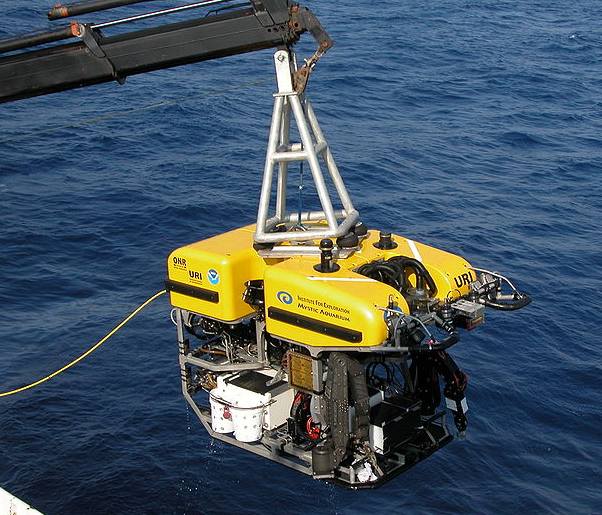
DEEP
DISCOVERER - The remotely operated vehicle, Deep Discoverer, being recovered after completing 19 dives during the Windows to the Deep 2019 expedition.
Image: Art Howard, Global Foundation for Ocean Exploration.
ROVs range in size from that of a small computer to
being as large as a small truck. Larger ROVs are very heavy and need other equipment such as a winch to put them over the side of a ship and into the water.
While using ROVs eliminates the “human presence” in the water, in most cases, ROV operations are simpler and safer to conduct than any type of occupied-submersible or diving operation because operators can stay
dry and warm, or safely on ship decks. ROVs allow underwater
investigation in areas that are too deep for humans to safely dive
themselves. And ROVs can stay underwater much longer than a human diver,
without decompression, making more time for exploration.
ROVs are used extensively by the scientific community to study the ocean. A number of deep sea animals and plants have been discovered or studied in their natural environment through the use of ROVs; examples include the
jellyfish Stellamedusa ventana and the eel-like halosaurs. In the US, cutting edge work is done at several public and private oceanographic institutions, including the Monterey Bay Aquarium Research Institute (MBARI), the Woods Hole Oceanographic Institution (WHOI) (with Nereus), and the University of Rhode Island / Institute for Exploration (URI/IFE).
Science ROVs take many shapes and sizes. Since good video footage is a core component of most deep-sea scientific research, research ROVs tend to be outfitted with high-output lighting systems and broadcast quality cameras. Depending on the research being conducted, a science ROV will be equipped with various sampling devices and sensors. Many of these devices are one-of-a-kind, state-of-the-art experimental components that have been configured to work in the extreme environment of the deep ocean. Science ROVs also incorporate a good deal of technology that has been developed for the commercial ROV sector, such as hydraulic manipulators and highly accurate subsea
navigation systems. They are also used for underwater archaeology projects such as the Mardi Gras Shipwreck Project in the
Gulf of Mexico and the CoMAS project in the
Mediterranean
Sea.
While there are many interesting and unique science ROVs, there are a few larger high-end systems that are worth taking a look at. MBARI's Tiburon vehicle cost over $6 million US dollars to develop and is used primarily for midwater and hydrothermal research on the West Coast of the
US. WHOI's Jason system has made many significant contributions to deep-sea oceanographic research and continues to work all over the globe. URI/IFE's Hercules ROV is one of the first science ROVs to fully incorporate a hydraulic propulsion system and is uniquely outfitted to survey and excavate ancient and modern shipwrecks. The Canadian Scientific Submersible Facility ROPOS system is continually used by several leading ocean sciences institutions and universities for challenging tasks such as deep-sea vents recovery and exploration to the maintenance and deployment of
ocean observatories.
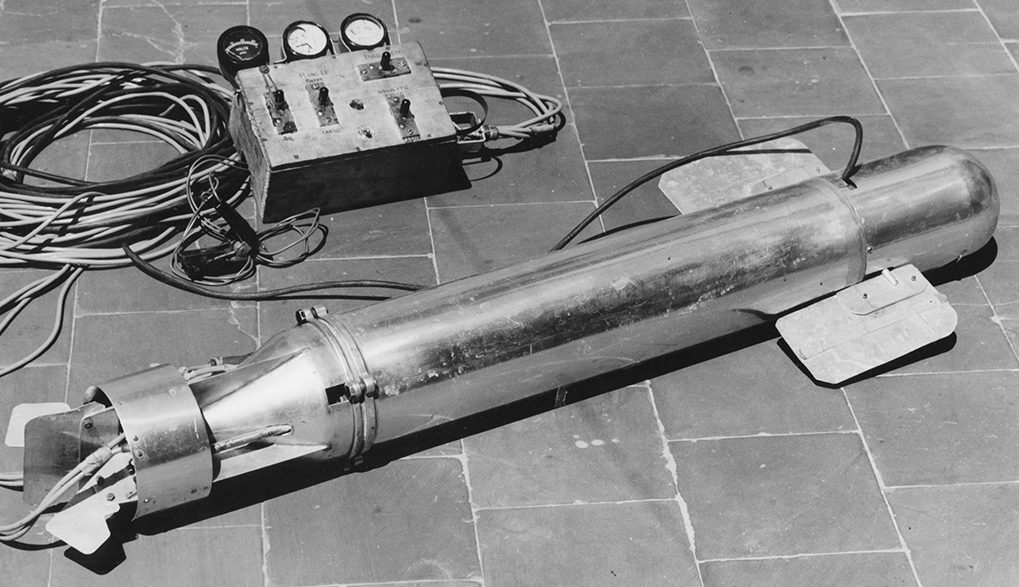
1953
POODLE
- The first ROV ever built was the Poodle made in 1953 by Dimitri Rebikoff, a French pioneer in dive equipment and photography. The Poodle was an unmanned adaptation of
Dimitri's dive scooter with a tether and surface controls.
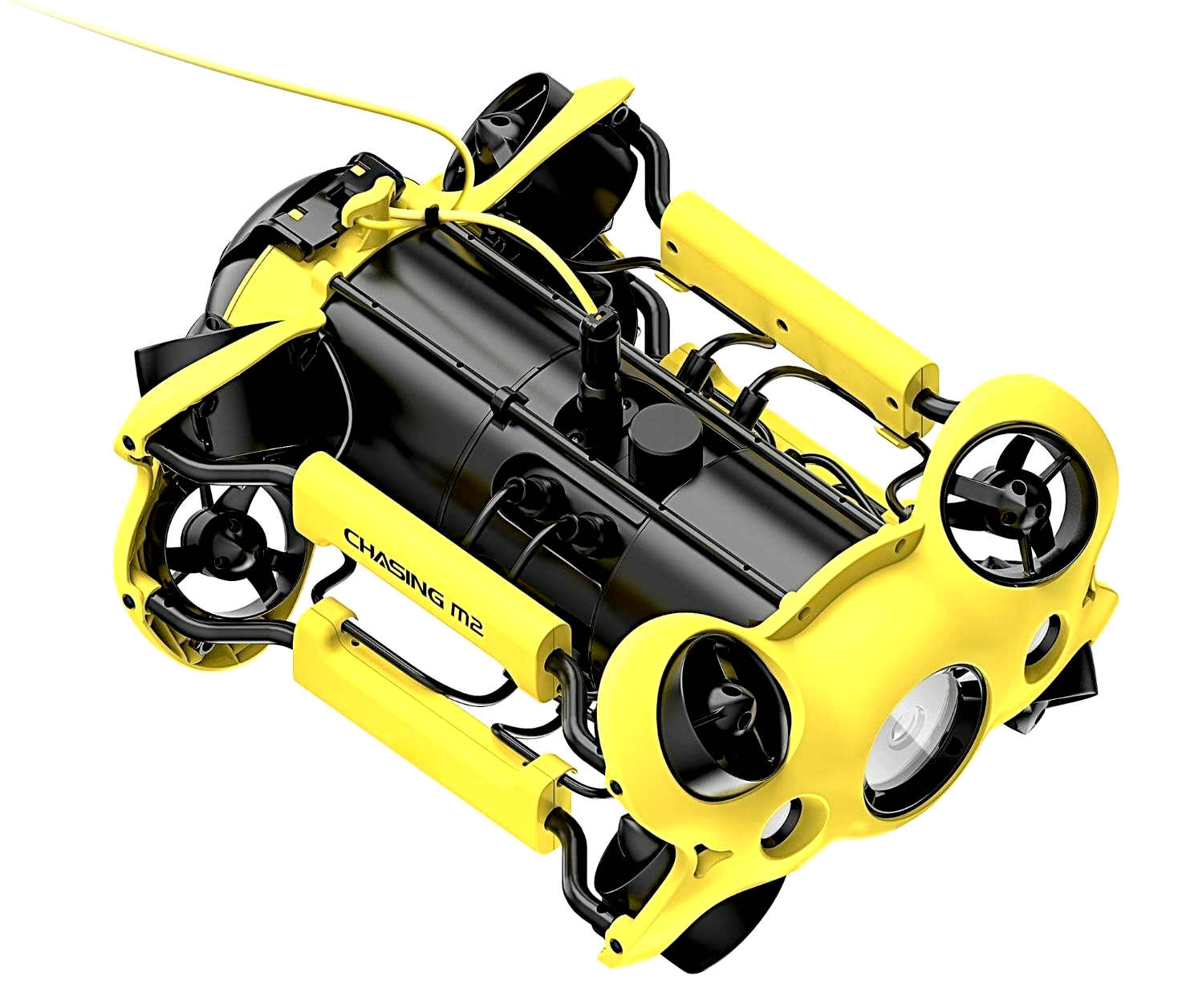
$2500
- Explore unchartered areas with the Chasing M2, the next level of professional underwater drones for industrial applications. This ready-to-use underwater drone features a 4000 lumen LED light and a 4K stabilized camera for great underwater videos of all depths and minimal light. The M2 also features an anti-stuck motor, which prevents the propellers from getting stuck on obstacles underwater, as well as 8 omni directional thrusters for full 360 degree movement.
You can add additional attachments for an even more sophisticated product.
The ROV can last up to 4 hours on a single charge and dive as deep as 100 meters with speeds up to 3 knots (1.5 m/s). M2 offers F1.8 FOV, equipped with 1/2.3 SONY CMOS and EIS anti video-shake feature, which improves the camera's low light performance and dynamic range greatly.
This bundle includes the drone, remote controller, charger, 200m tether and winder.
Industrial applications include:
- Scientific Exploration
- Underwater Photography
- Hull & Dock Inspection
- Aquaculture Inspection
- Search and Rescue
- Omni Movement & Sophisticated Attachments
CHASING M2 is a professional underwater ROV/Drone designed for professional users and industrial applications. M2 allows omni movement in all directions, and has a more powerful mount extension system to meet the needs of multi-professional scenarios.
M2 has 8 Vectored Thrusters layout which allows OMNI movement in all directions. The aluminum alloy compact body allows single person operation and quick-deployment in 3 minutes.
The
M2 features a 97.68WH lithium battery provides you with up to 4 hours battery life.
The 64G SD memory card is removable, and users can choose SD cards of different capacities, up to 512G.
M2 has two 2000 lumen LED lights (three gears), which can make up for the
dimness of deep water and night vision, improve the underwater visual distance and clarity, and highly restore the true underwater color.
THE
MAIN COMPONENTS OF AN ROV
Frame. The frame provides a structure to attach the thrusters, camera, lights, tether, and other components of the
ROV. It is the most important part of any ROV design. Most ROVs are built with an open rectangular frame that makes it easy to build and modify, but some ROVs are built with highly specialized frames to reduce drag, improve appearance, or perform a special mission.
Thrusters. The thrusters are electrically or hydraulically powered propellers used to maneuver the vehicle. There are almost always multiple thrusters to provide movement in multiple directions.
Tether. Nearly all ROVs have a tether that carries electrical power and/or signals to the surface so that the pilot can control the vehicle and see the camera. Radio waves don’t travel far through water, so it’s not possible to operate an ROV with modern wireless technology. There are acoustic and optical modem technologies that may someday enable wireless operation.
Pilot Controls. The surface controls can range from something that looks like the control room for a spaceship to something as simple as a
smartphone, or and Xbox game controller. The surface controls provide a physical interface for the pilot to control the vehicle and a display of feedback from the vehicle including the camera view.
Camera. Since the vehicle travels deep underwater, the only view that the
drone pilot has is through the onboard camera, which must be able to provide an image with low-latency.
Lights. The lights provide illumination for the camera
(hence operator) to see underwater. Sunlight disappears rapidly underwater and many ROV missions occur at depths that are normally in complete darkness.

ROVs
or UUVs - Are generally smaller unmanned underwater vessels,
than their crewed counterparts,
without life support, making them cheaper to build and
operate.